1. 前言
最近在做usrp相关的项目的时候,需要涉及到对usrp的源码进行仿真,从usrp的官方资料上来看,usrp提供了许多工具,包括综合的仿真的,确实能够让人受益匪浅。通过学习USRP的工程,我感觉对自己编码能力上的帮助先不说,对于提升自己的工程管理能力,肯定是有巨大的帮助的。为了能够更好地学习仿真与验证的相关知识,有必要把modelsim的自动化仿真学习一下。
2. modelsim 自动化仿真
在学习modelsim自动话仿真的时候,首先需要知道modelsim在工作的时候,其实是通过命令来执行操作,如果把一系列命令写在一个脚本里面也就是.do文件当中,那么我们在modelsim里面,只需要执行这个脚本就可以完成仿真了。因此需要对modelsim仿真的一些简单的语法进行记录。这一部分可以参考:modelsim仿真
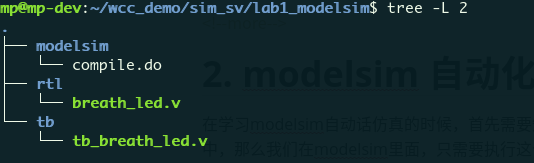
首先我们可以按照下面的方式来排列文件:
modelsim文件夹用来存放和modelsim仿真相关的文件,比如仿真的脚本等,modelsim仿真过程当中产生的中间文件等。
rtl文件夹用来存放可综合的源文件
tb文件夹用来存放testbench
2.1 modelsim基础语句
一个简单modelsim自动化脚本如下:
1 | # quit simulation |
quit -sim 表示退出之前的, .main clear 是清空控制台
vlib
- vlib 表示通过modelsim创建一个文件夹,可以用来存放modelsim的一个文件,其作用就和使用mkdir创建一个文件夹是一样的。
vlib demo_dir就是在指定的路径下面创建一个demo_dir文件夹
vmap
vmap实现逻辑库和物理库的映射
在modelsimGUI界面的Library选项卡里面创建子选项,这个子选项就叫做逻辑库,编译工程之后,得到一堆编译文件,这些文件名就放在这个逻辑库选项卡里面。但是编译得到的是实体文件,这些文件必须有一个目录存储,因此就需要把逻辑库映射到物理(文件夹)目录,也就是把那些得到的实体文件放在某一个文件夹目录(路径当中)。
vmap logic_lib demo_dir的作用就是将逻辑库映射到demo_dir这个路径下,这样逻辑库当中的文件最终会保存在demo_dir下。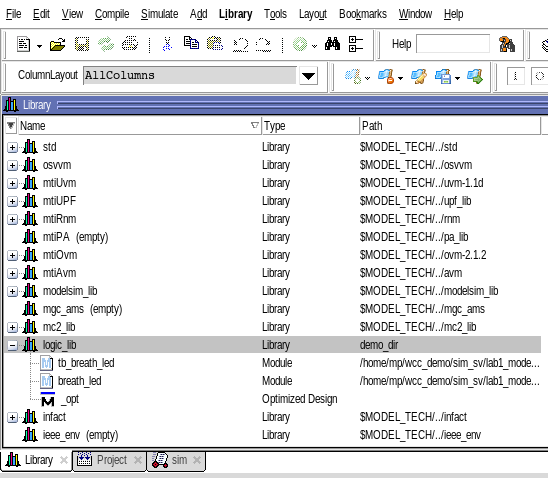
vlog/vcom
vlog/vcom分别是用来编译verilog 和vhdl的,对于systemverilog,使用vlog -sv进行编译对应的systemverilog文件-incr参数是为了实现增量编译,对于一个比较大的项目,可能有好几百个verilog文件,如果在debug的时候,只修改了其中的一小部分,那么使用增量编译会将修改的文件进行编译,加快编译速率。+incdir+参数是指定后面的源文件是一个头文件,在仿真的时候,需要包含到工程当中,例如:1
vlog -incr -work xil_defaultlib "+incdir+../../../../u220_b205_network.srcs/sources_1/imports/sdr_opensource/uhd/fpga/usrp3/lib/control"
就是将xx/usrp3.lib/cotorl下的.vh头文件包含到当前的逻辑库当中。
vlog的语法为
vlog [参数] -work -<逻辑库名称> <file1.v> <file2.v>...,使用vlog将指定的源文件和仿真文件编译到逻辑库当中,也就是上面的vlog -incr -work logic_lib ../rtl/breath_led.v,这句话的含义就是将breath_led.v这个文件编译到逻辑库当中。如果在使用IP的时候,可以使用通配符将IP路径下的所有.v文件编译到逻辑库当中。
vsim
vsim的语法如下,其中-lib是指定链接的逻辑库,也可以使用-L来进行连接
1
vsim –lib <library name>.<top level design>
编译完成之后,就可以启动仿真了,(-voptargs=+acc 是优化部分参数),连接到默认的logic_lib逻辑库,启动逻辑库下面的tb_breath_led进行仿真
1
vsim -voptargs=+acc logic_lib.tb_breath_led
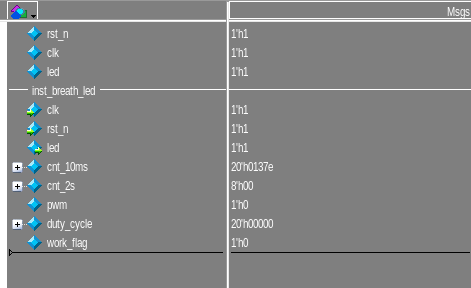
add wave
添加想要观察的信号,add wave 加上想要观察的信号的名称。
1
add wave -position insertpoint sim:/tb_breath_led/*
如果想要添加分割线可以添加如下语句
1
add wave -divider inst_breath_led
restart/run
- run+时间运行指定时间长度, restart将波形进行置位。
上面就相当于提供了一个基本的仿真的模板,当然这只是一个最简单的情况。实际当中可能还会设计到IP的引入,这个在之后的内容当中再进行学习和记录,除了这些基本的do文件之外,还可以通过makefile的方式,最终能够实现一个makefile来管理工程。