在这个文档当中,我们将会尝试使用SPI接口来读写A7-Lite上的QSPI Flash。在之前的SD卡读写部分,我们已经介绍了SPI协议,并且使用SPI协议完成了对SD卡的读写,因此在这一部分,将不会花太多内容在如何实现一个SPI协议上,更多的精力将放在对Flash芯片的访问之上。
在A7-Lite上板载了一个ISSI的Flash芯片,IS25LP128,我们首先了解一下这芯片,可以从ISSI的网站上下载这个芯片的数据手册: IS25LP128
1. IS25LP128芯片手册
1.1 SPI模式
IS25LP128支持两种接口模式,一种是SPI模式,一种是QSPI模式,在这篇文档当中我们主要关注SPI模式。
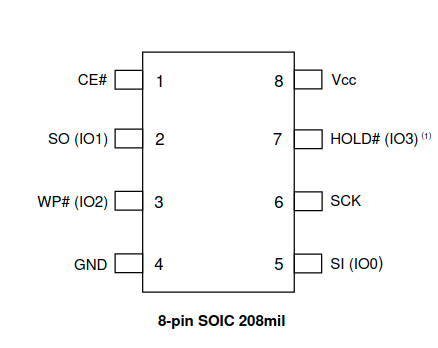
在SPI模式下:CE#为片选信号,SCK为时钟信号,SI(IO0)是MOSI信号,SO(IO1)是MISO信号。
在QSPI模式下:数据信号由IO0~IO3组成,这些信号都是双向的。某种意义上来说使用QPSI模式,相对于SPI模式会更简单一点。
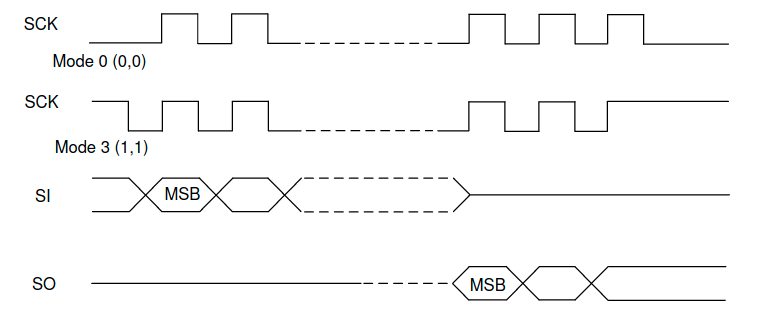
SPI的工作模式,不论在什么模式下,数据在上升沿写入,在下降沿读出。CS信号拉低的时候,开始进行操作。
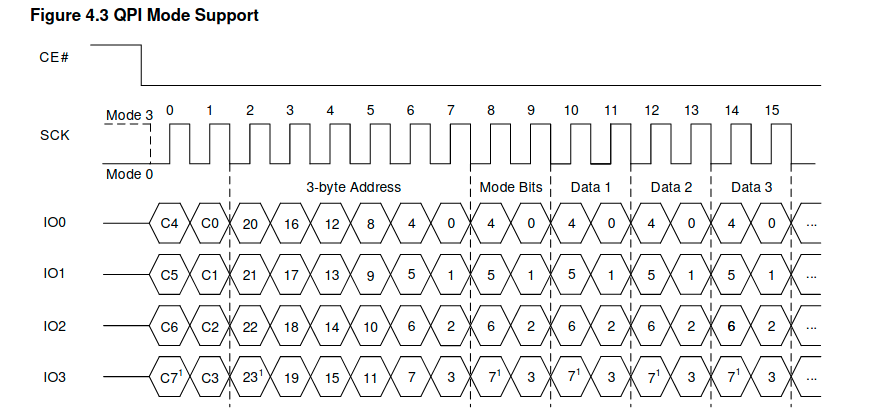
QPI模式下的传输过程
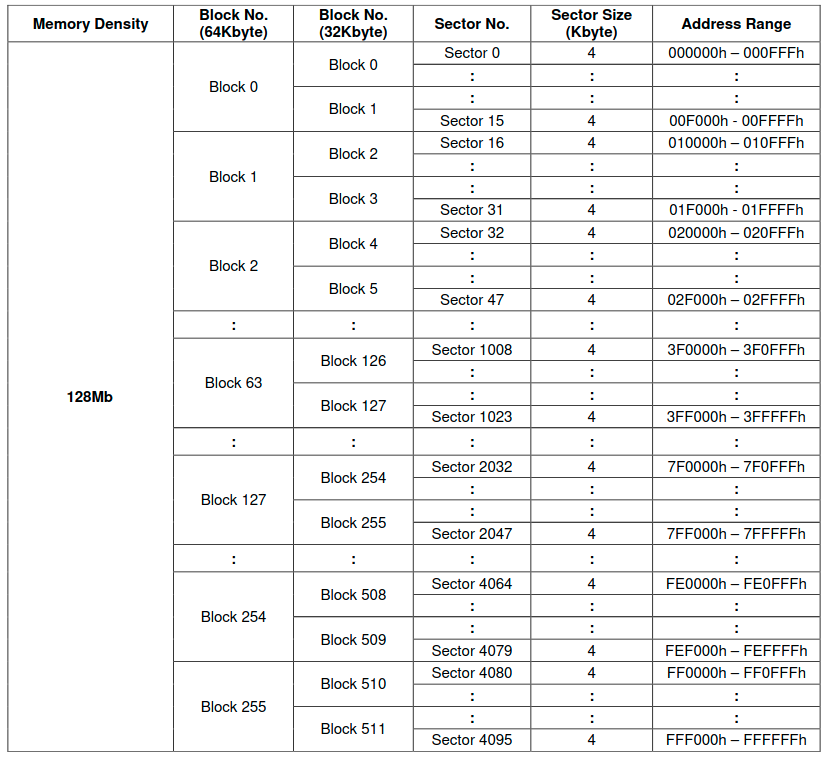
1.2 芯片容量分配
一个扇区是4KB,一个32K block由相邻的8个扇区组成, 一个64K block由相邻的16个扇区组成。
IS25LP128一共有256个64Kblock,512个32Kblock,4096个扇区。
1.3 寄存器
IS25LP256具有三组寄存器:状态、功能和读取。 当连续读取寄存器时,重复输出相同的字节,直到 CE# 变为高电平。
1.3.1 状态寄存器

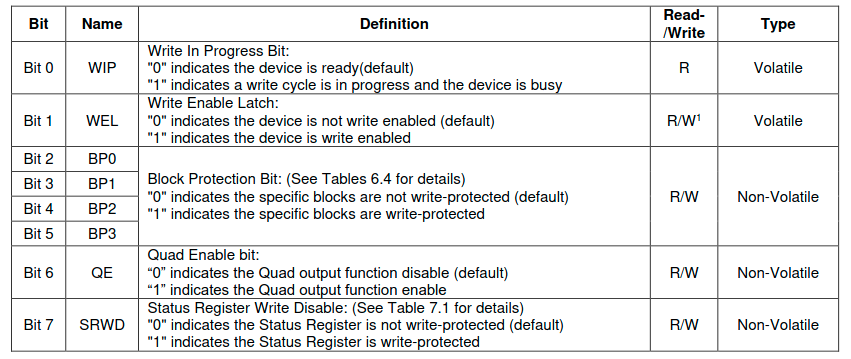
WIP:指示芯片的状态,当为1的时候,表示芯片正处于写入的状态,不能进行写入。
WEL:当这个bit为0的时候,芯片处于不可写入的状态,只有当这一位为1的时候,芯片才处于可以写入的装药,可以通过WREN命令置位。
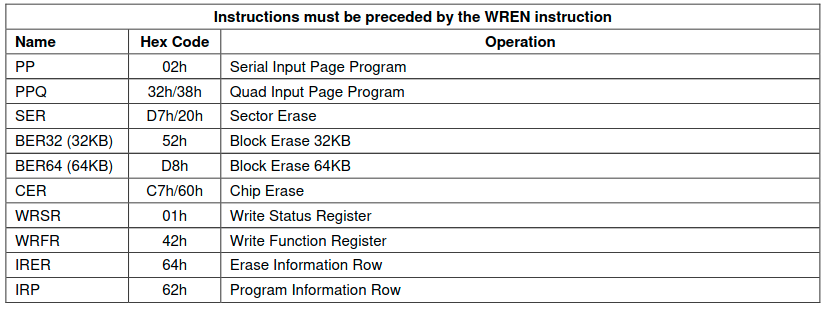
除设置易失性读取寄存器之外,每个写入寄存器、编程(PP命令,写入数据)和擦除指令之前必须有一个 WREN 指令。
需要设置WREN指令的命令如下:
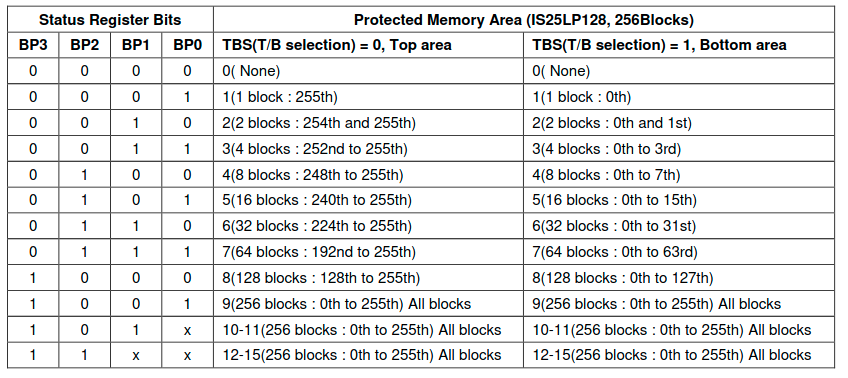
- BP3~BP0:用来设置保护区域的,保护区域的对应关系如下,当对应的区域被保护的时候,无法进行擦除和写入操作。
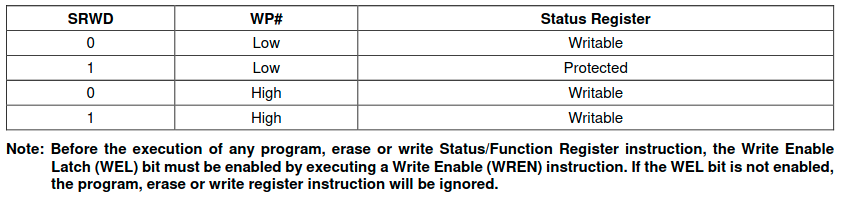
- SRWD: 状态寄存器写禁止 (SRWD) 位与写保护 (WP#) 信号一起运行以提供硬件保护模式。 当 SRWD 设置为“0”时,状态寄存器不受写保护。 当 SRWD 设置为“1”且 WP# 被拉低(VIL)时,状态寄存器的位(SRWD、QE、BP3、BP2、BP1、BP0)变为只读,WRSR 指令将被忽略. 如果 SRWD 设置为“1”且 WP# 被拉高 (VIH),则可以通过 WRSR 指令更改状态寄存器
- QE: 四线使能 (QE) 是状态寄存器中允许四线操作的非易失性位。 当 QE 位设置为“0”时,引脚 WP# 和 HOLD# 被启用。 当 QE 位设置为“1”时,IO2 和 IO3 引脚被启用。
1.3.2 功能寄存器

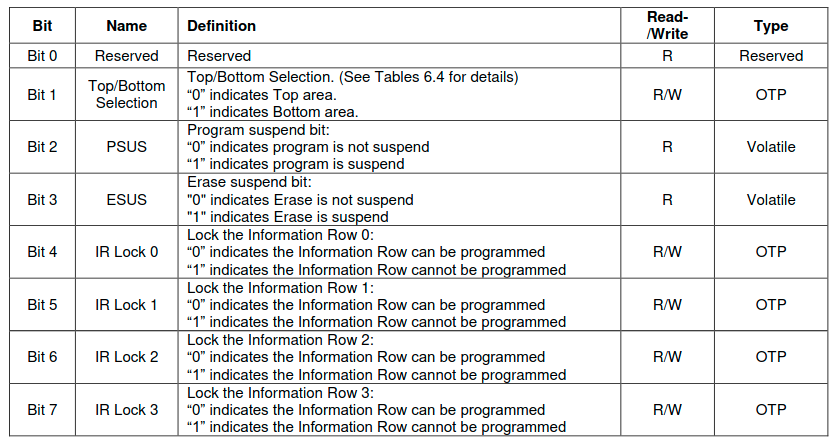
- Top/Bottom Selection: 保护区域选择,可以选择顶部或者底部,只能更改一次。
- PSUS :程序暂停状态位指示程序操作何时暂停。 在程序运行期间发出暂停命令后,PSUS 变为“1”。 一旦挂起的程序恢复,PSUS 位将重置为“0”
- ESUS: 擦除暂停状态指示擦除操作何时暂停。 在擦除操作期间发出挂起命令后,ESUS 位为“1”。 一旦挂起的擦除恢复,ESUS 位将重置为“0
- IRLOCK 0~3:信息行锁定位是可编程的。 如果位设置为“1”,信息行 无法编程。
1.3.3 读寄存器
读寄存器主要和QPI模式相关,在这里不做过多介绍。



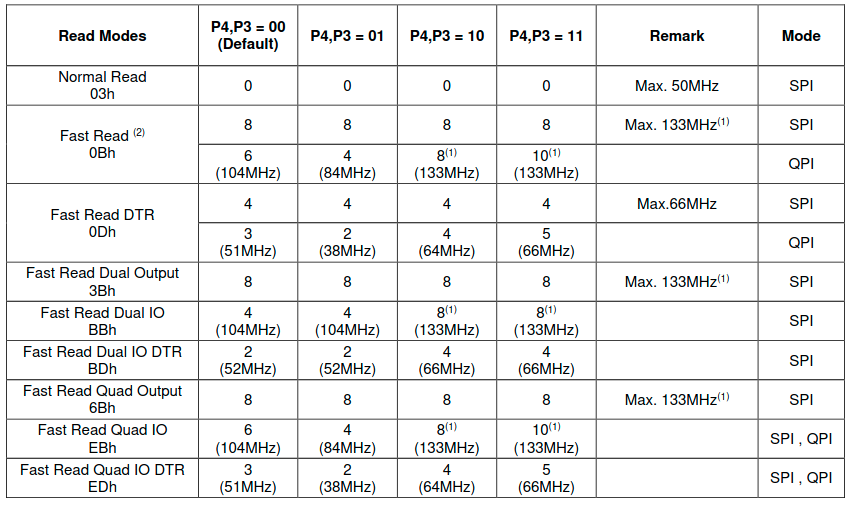
Read Dummy Cycles vs Max Frequency
1.4 保护机制
Flash支持硬件和软件写保护机制。如果用户希望Flash 的某些区域不能被更改,则可以启用这些保护机制。
硬件保护机制可以用来保护状态寄存器,可以使得状态寄存器不能被用户写入数据,从而保证被保护的区域不能更改。
软件的保护机制在前面介绍状态寄存器的时候,已经提及过,通过对BP0~BP3的设置,可以来选择呢些block是不能被修改的。
1.5 设备操作
该设备使用一个 8 位指令寄存器。在串行数据输入 (SI) 或串行数据 IO(IO0、IO1、IO2、IO3)上,所有指令、地址和数据均以最高有效位 (MSB) 在前移入。 在芯片使能 (CE#) 被驱动为低电平 (VIL) 之后,SI 或 IO 上的输入数据在正常模式下在串行时钟 (SCK) 的上升沿锁存,在 DTR 模式下在上升沿和下降沿锁存。 每个指令序列都以一个字节的指令代码开始,然后是地址字节、数据字节,或者地址字节和数据字节,具体取决于指令的类型。 CE#必须 在指令序列的最后一位移入以结束操作后被驱动为高电平(VIH)。
在这里只记录几个通过SPI来读写寄存器时用到的命令。
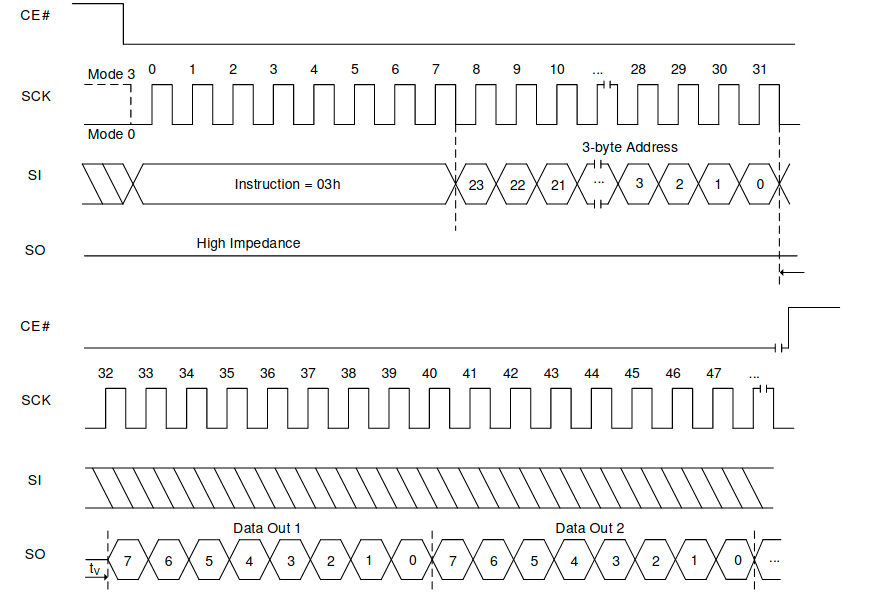
1.5.1 Normal Read 0x03
NORMAL READ (NORD) 指令用于以最大频率 50MHz的读取设备的内存内容。
NORD的指令的顺序如下,首先CE#拉低,然后在SI上传输NORD Command,然后是三字节的地址。然后数据从SO线上传出,Flash当中的所有存储地址都可以在一次NORD命令当中被读出。
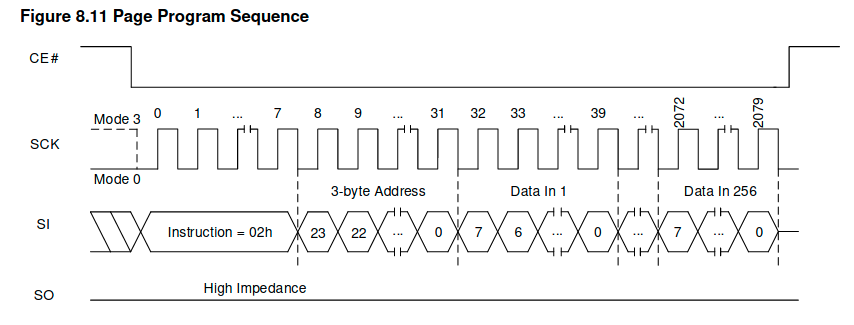
1.5.2 Page Program (PP 0x02)
页编程 (PP) 指令允许在一次操作中将最多 256 字节的数据编程到内存中。 要编程的存储器目标必须在块保护(BP3、BP2、BP1、BP0)位设置的受保护存储器区域之外。 试图编程到写保护页面的 PP 指令将被忽略。 在执行 PP 指令之前,必须通过 Write Enable (WREN) 指令启用 Write Enable Latch (WEL)。
PP 指令代码、三个地址字节和程序数据(1 到 256 字节)通过 SI 线输入。 CE#拉高后程序会立即开始运行,否则PP指令不会被执行。 内部控制逻辑自动处理编程电压和时序。 程序操作的进度或完成可以通过 RDSR 指令读取状态寄存器中的 WIP 位来确定。 如果 WIP 位为“1”,则程序操作仍在进行中。 如果 WIP 位为“0”,则程序操作已完成。
如果超过 256 字节的数据被发送到设备,地址计数器在同一页内翻转,先前锁存的数据被丢弃,最后 256 字节被保留以编程到页面中。 起始字节可以位于页面内的任何位置。 当到达页面末尾时,地址将环绕到同一页的开头。 如果要烧录的数据少于整页,则同一页上所有其他字节的数据将保持不变。
1.5.3 Erase
擦除命令将寻址扇区或块中的所有位设置为“1”,该设备的内存阵列被组织成统一的 4 KB 扇区或 32/64 KB 统一块(一个块分别由八个/十六个相邻扇区组成)。
在重新编程一个字节之前,必须擦除包含该字节的扇区或块(擦除将位设置为“1”)。 为了擦除器件,提供了三种擦除指令:扇区擦除 (SER)、块擦除 (BER) 和芯片擦除 (CER)。 扇区擦除操作允许擦除任何单个扇区而不影响 其他部门的数据。 块擦除操作擦除任何单独的块。 芯片擦除操作擦除设备的整个存储器阵列。 可以在任何编程操作之前执行扇区擦除、块擦除或芯片擦除操作。
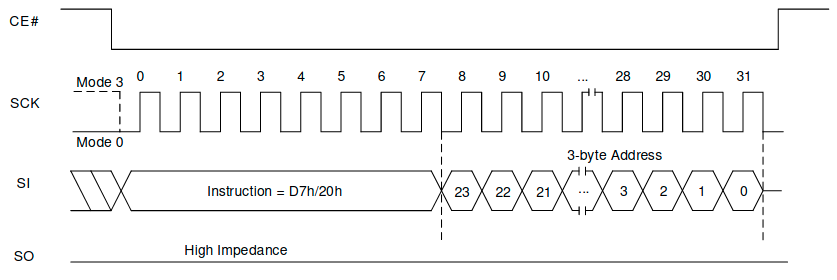
1.5.3.1 Sector Erase (SER 0xD7/0x20)
扇区擦除 (SER) 指令擦除 4 KB 扇区,在执行 SER 指令之前必须通过写使能 (WREN) 指令设置写使能锁存器 (WEL)。 WEL 位在扇区擦除操作完成后自动复位
擦除操作的进度或完成可以通过使用 RDSR 指令读取状态寄存器中的 WIP 位来确定。 如果 WIP 位为“1”,擦除操作仍在进行中。 如果 WIP 位为“0”,擦除操作已经完成
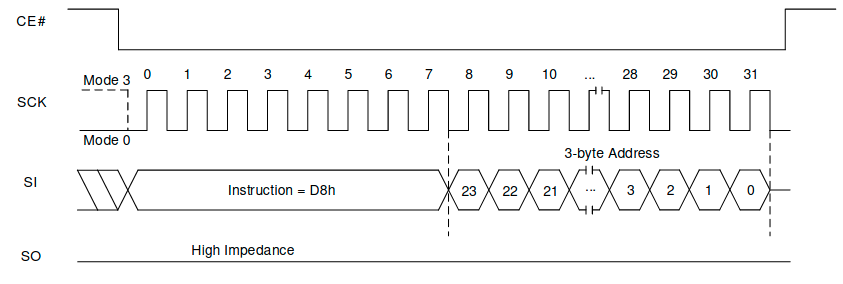
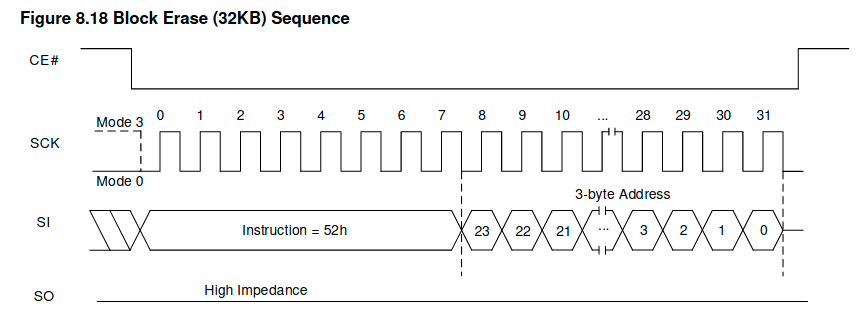
1.5.3.2 Block Erase(BER32K 0x52, BER64K 0xD8)
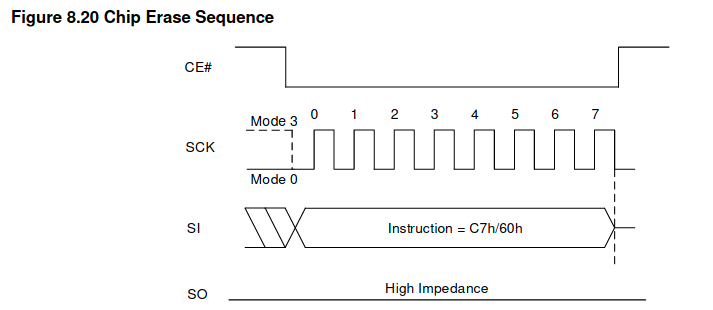
1.5.3.3 Chip Erase(CER 0xC7/0x60)
芯片擦除 (CER) 指令擦除整个存储器阵列。 在执行 CER 指令之前,必须通过写使能 (WREN) 指令设置写使能锁存器 (WEL)。 WEL 在芯片擦除操作完成后自动复位
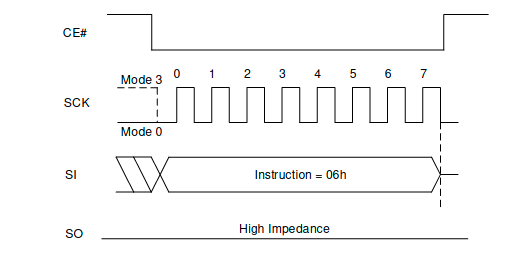
1.5.4 Write Enable(WREN 0x06)
写使能 (WREN) 指令用于设置写使能锁存器 (WEL) 位。 WEL 位在上电后复位为写保护状态。 WEL 位必须在任何写操作之前启用写操作,包括扇区擦除、块擦除、芯片擦除、页面编程、编程信息行、写状态寄存器和写功能寄存器操作。 写操作完成后,WEL 位将自动复位为写保护状态。 在执行上述任何操作之前都需要 WREN 指令
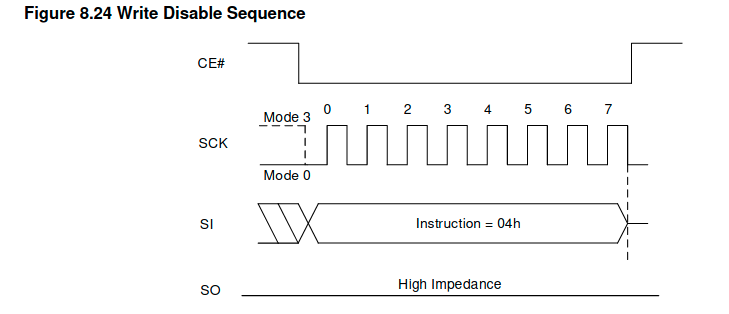
1.5.5 Write Disable(WRDI 0x04
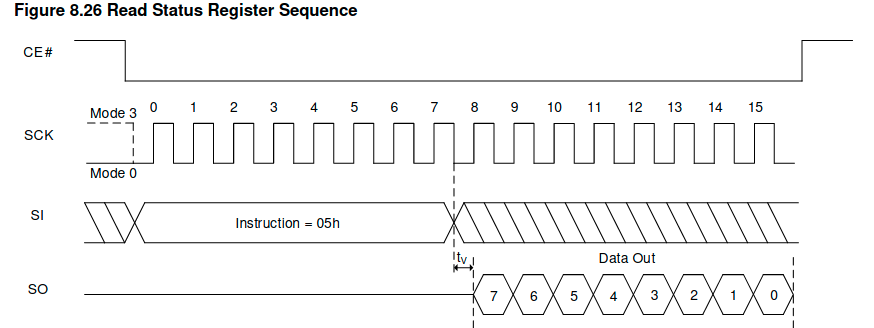
1.5.6 Read Status Register(RDSR 0x05)
读取状态寄存器 (RDSR) 指令提供对状态寄存器的访问。 在执行写、擦除或写入状态寄存器操作期间,可以使用 RDSR 指令通过读取状态寄存器的 WIP 位来检查操作的进度或完成情况。
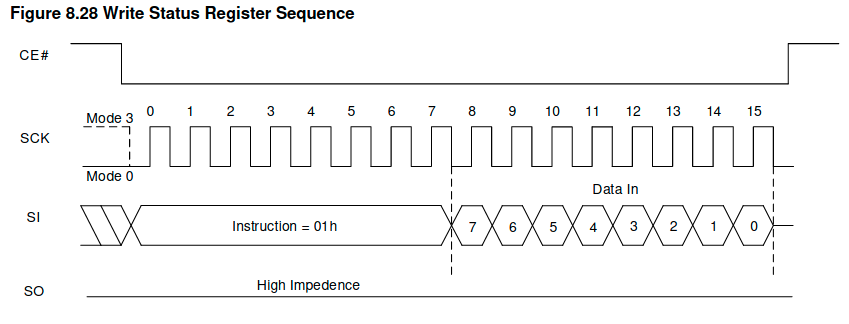
1.5.7 Write Status Register(WRSR ,0x01)
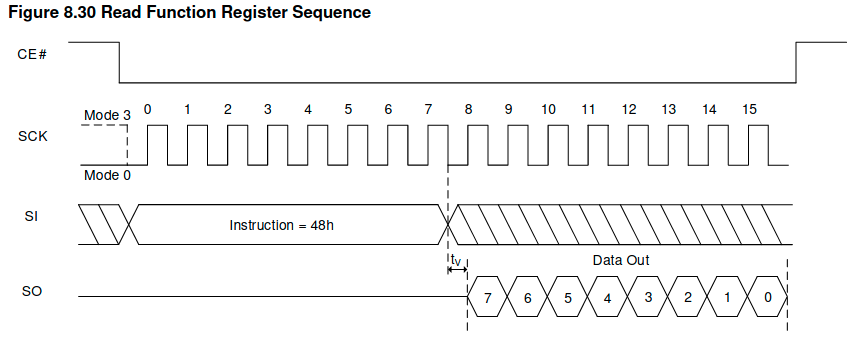
1.5.8 Read Function Register(RDFR 0x48)
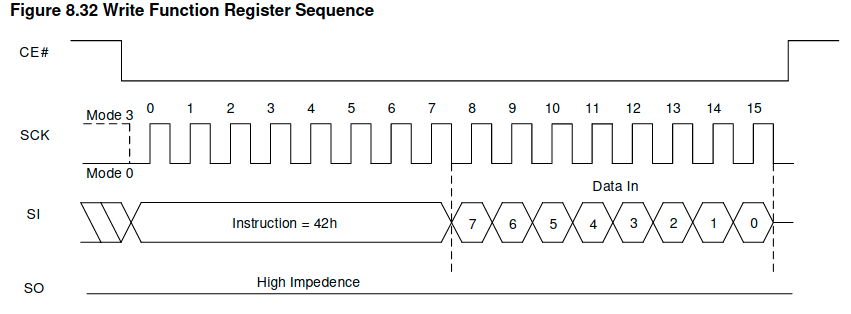
1.5.9 Write Function Register(WRFR 0x42)
写功能寄存器 (WRFR) 指令允许用户通过将 TBS 位设置为“1”来从顶部块区域(默认)更改为底部块区域。 信息行锁定位 (IRL3~IRL0) 也可以通过 WRFR 指令单独设置为“1”以锁定信息行。 由于TBS 位和IRL 位是OTP,一旦设置为“1”,就不能再设置回“0”。
1.5.10 Read Product ID(RDID 0xAB)
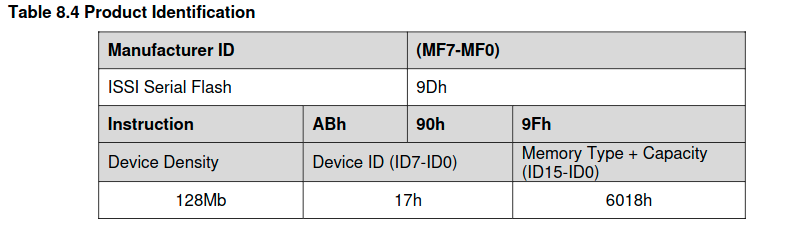
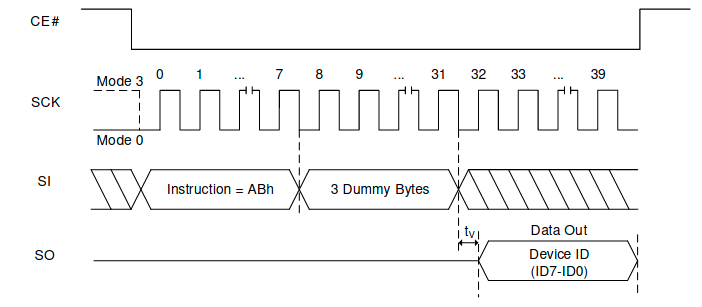
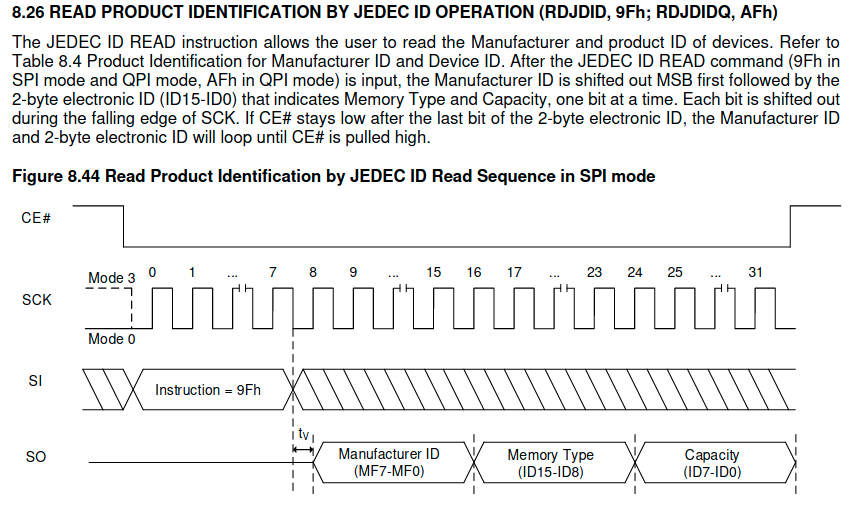
1.5.10 Read Product JDID(RDID 0x9F)
2. Flash读写的具体设计
2.1 SPI读写模块
在了解了上面的Flash芯片相关的内容之后,我们可以得出一个结论,对Flash的操作都是以命令+地址+数据的这种形式来进行传输的,其中地址和数据是可选的。比如:如果想要使设备处于可以写入的状态,我们只需要向设备发出命令,而不需要额外的地址和写入的数据。又比如,如果我们想要读取Flash的寄存器的数据,我们只需要向Flash发出命令然后在接收返回的数据即可。
因此,我们可以首先抽象出一个对Flash操作的最基本的模块,该模块接收来自上一级的命令地址和数据,根据不同地情况完成对Flash的访问。首先,我们需要确定在这个模块当中支持的命令。
| 命令 | 描述 |
|---|---|
| CMD_WREN | 写使能,进行擦除和写入Flash的时候,先要由此命令,不需要地址和数据 |
| CMD_ERASE | 擦除指令,需要给定起始地址 |
| CMD_PP | 写操作,需要给出起始地址和要写入的数据 |
| CMD_RDSR | 读取状态寄存器,不需要地址,从Flash读出状态寄存器的数据 |
| CMD_NORD | 读取Flash数据,需要地址,从Flash读出存储空间的数据 |
| CMD_RDID | 读取设备的ID,不需要地址,从Flash读出数据 |
| CMD_RDJDID | 读取设备的JDID,作用与CMD_RDID类似,读出三字节的数据 |

| Port name | Direction | Description |
|---|---|---|
| clk | input | |
| rst | input | |
| cmd_start | input | 一次命令起始信号,拉高1 beat |
| cmd | input | 具体的命令类型,比如:WREN, PP, NORD,RDSR等等 |
| cmd_addr | input | 需要读取的地址,只有访问存储空间的时候才有效,访问寄存器时无效 |
| addr_len | input | 如果需要访问存储空间时,该值为3,如果访问寄存器或者其他命令为0 |
| wr_data | input | 要写入Flash存储空间的数据 |
| wr_len | input | 要写入Flash存储空间数据的长度,一般为256字节,一个Page |
| wr_data_pop | output | 向上游模块取数据信号,该信号有效的时候,上游模块将会给出一个数据 |
| wr_done | output | 一次写入操作完成 |
| rd_data | output | 从Flash读出的数据 |
| rd_len | input | 一次读操作的长度 |
| rd_data_valid | output | 读出的数据有效信号 |
| rd_done | output | 一次读取操作完成 |
| busy | output | 该模块处于忙碌状态 |
| spi_clk | output | |
| spi_cs_n | output | |
| spi_mosi | output | |
| spi_miso | input |
在这个模块当中,我们设计一个状态机来完成对各种不同情况的判断与跳转:

IDLE:复位所处的状态,复位结束,进入ARBIT状态
ARBIT状态:在ARBIT状态下,如果检测到一次命令开始cmd_start有效,判断当前的命令,如果是写这一类的则跳转进入WR_START状态。如果是读一类命令则跳转进入RD_START状态。
WR_START:直接跳转到写WR_COMMAND状态。
WR_COMMAND:在该状态下,需要注意这个命令是否包含地址和数据,如果是WREN命令,则在高状态结束的时候,直接跳转到WR_STOP状态,如果该命令是对寄存器的写操作,那么跳转到WR_DATA状态。如果该命令是对内存空间的操作,比如写Flash或者擦除Flash则进入WR_ADDR状态。
WR_ADDR:当3字节的地址写入完成之后,如果是擦除操作,那就直接进入到WR_STOP状态,如果是写入数据,那么将会进入到WR_DATA状态。
WR_DATA: 当所有数据都写入到寄存器或者存储空间之后,跳转到WR_STOP状态,结束本次操作。
WR_STOP:直接跳转到ARBIT状态。
RD_START:标志一次读开始,直接进入RD_COMMAND状态。
RD_COMMAND: 需要检测是否是对存储空间的读取,如果是读寄存器在状态结束的时候,跳转到接收读取的数据状态,如果是读取Flash的数据,呢么需要进入到给出要读取的Flash 的地址的状态。
RD_DATA:接收读取到的数据,所有数据接收完成之后,跳转到RD_STOP状态
RD_STOP:直接跳转到ARBIT状态。
有了这个状态机的描述,剩下的就是取根据这个状态机完成具体的代码,具体代码不在文档中进行记录,用户可以查阅源码。
2.2 封装SPI读写模块
在前面我们实现了一个最基础的操作Flash的模块。然而在实际操作Flash的时候,可能需要遇到一些比较复杂的情况,比如在写入Flash之前,我们需要检查Flash的状态,通过读取状态寄存器,判断当前Flash是否处于忙碌的状态,知道Flash处于空闲,我们才可以进行写入。
因此这样就需要多个操作进行组合才能成功地将数据写入到Flash 当中。再回想我们最终的目的,最终的目的是能够对Flash进行写入,擦除和读取,因此我们可以对前面的模块进行一个封装,从而提供给用户一个向上的接口,用户只需要简单地执行写入,擦除,读取命令即可,而不必取关心Flash所处的状态。
经过简化之后,上游模块只需要处理三类命令即可,分别是读取,写入和擦除操作。
其中在读取数据的时候,增加可对芯片ID的读取,在实际使用的时候,可以不需要这两种操作。

| Port name | Direction | Description |
|---|---|---|
| clk | input | |
| rst | input | |
| cmd_type | input | 用户的命令 |
| cmd_req | input | 用户命令请求 |
| cmd_ack | output | 用户命令响应 |
| total_bytes_to_pp | input | 一共需要写入的数据长度 |
| wr_data | input | 写入Flash的数据 |
| wr_data_pop | output | 下游模块从用户取出要写入Flash的数据 |
| wr_flash_done | output | 所有数据写入完毕 |
| total_bytes_to_erase | input | 一共要擦除的数据长度 |
| erase_flash_done | output | 所有出数据擦除结束 |
| total_bytes_to_rd | input | 一共需要读取的数据长度 |
| rd_data | output | 读出出来的数据 |
| rd_data_valid | output | 读取数据有效 |
| rd_flash_done | output | 所有数据读取完成 |
| flash_is_busy | output | flash处于忙碌状态 |
| spi_clk | output | |
| spi_cs_n | output | |
| spi_mosi | output | |
| spi_miso | input |

该模块的状态机如上图所示:
IDLE: 复位状态,复位结束之后进入ARBIT状态
ARBIT: 在该状态下,如果用户发起了请求,则进入到RDSR状态,读取状态寄存器,判断当前是否处于空闲。
RDSR: 读取状态寄存器,如果设备空闲则进入DEVICE_READY状态,否则返回到ARBIT状态。
DEVICE_READY:在该状态下,判断用户是需要进行的操作,如果是写入寄存器或者擦除操作,则进入到WREN状态,如果是读取Flash则进入到读取状态。
WREN:WREN命令结束,需要跳转到WREN_CHECK状态,进一步判断当前是否可以进行写入或者擦除操作。
WREN_CHECJK: 如果设备处于可以进行写入或者擦除操作,状态寄存器的WELbit为1,则进入写入或者擦除状态。如果当前设备不可写入,那么需要再起发起读取状态寄存器,知道WEL bit为1。
PP: 写入数据,一次写入的数据长度是256字节,也就是一个PAGE,写入完成之后需要进入PP_CHECK状态。
PP_CHECK: 判断是否所有数据都已经写入到Flash,如果还有数据没有写入到Flash,那么跳转到WR_RDSR状态,获取当前Flash的状态,为下一次写入做准备,如果所有数据都写入,则跳转到ARBIT状态。
WR_RDSR:写入数据时读取Flash 状态寄存器,如果设备空闲,则进入WREN状态,开始下一次写入。否则,继续向Flash发送读取状态寄存器的命令,直到Flash 空闲。
ERASE:一次擦除一个扇区,一次擦除结束之后,进入到ERASE_CHECK状态。
ERASE_CHECK:如果需要擦除的扇区都被擦除,进入到ARBIT状态,如果还有扇区没有被擦除,那么跳转到ERASE_RDSR状态,获取当前Flash的状态,为下一次擦除做准备
ERASE_RDSR: 擦除时读取Flash 状态寄存器,如果设备空闲,则进入WREN状态,开始下一次擦除。否则,继续向Flash发送读取状态寄存器的命令,直到Flash 空闲。
READ: 数据全部从Flash读取之后,跳转到ARBIT状态。
2.3 顶层测试模块
有了前面封装好之后的模块,我们就可以来完成一个模块实现对上面封装好的模块的测试。
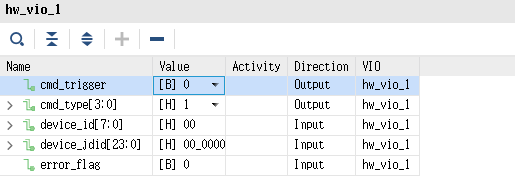
在这个模块当中,我们会使用一个VIO来产生测试命令和用户请求,并观察读取到的DEVICE ID和JDID。
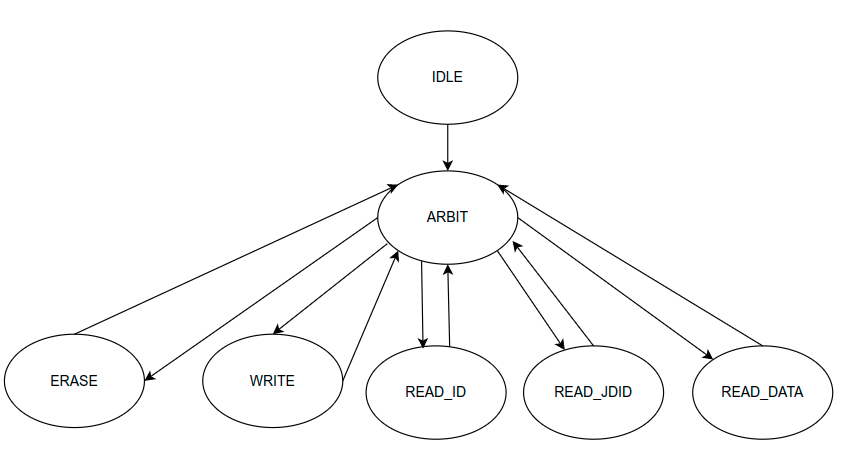
在这个模块当中,将实现如下的状态跳转:
IDLE: 复位状态
ARBIT: 判断来自VIO产生的用户请求和命令。在这个状态下,检测VIO产生的cmd_trigger信号的上升沿,如果检测到上升沿,我们就可以开始产生一次用户请求。然后分别进入到5个不同的状态,分别是ERASE,WRITE,READID,READ_JDID,READ_DATA这几个状态。
ERASE,WRITE,READID,READ_JDID,READ_DATA: 一次操作结束时回到ARBIT状态。
在写入数据状态,我们会向Flash的地址0~0x20000的地址空间写入0~255的递增数,在擦除状态,我们会将0~0x20000的空间的说有数据擦除。
为了验证我们的设计,在开始之前,我们可以先启动一次读Flash操作,查看当前从Flash当中读出的数据, 一般情况下,为对Flash进行任何操作的时候,读出的将是随机数。
然后我们可以启动一次擦除操作,擦除之后,对应地址里的值应该为0xFF,然后我们可以再一次启动读操作,查看当前是否所有数据都为0xFF.
接下来我们可以进行一次写操作,将递增数写入到flash当中,然后在启动读操作,查看当前读出的数据是否是递增数。由此判断我们Flash控制器是否有效。
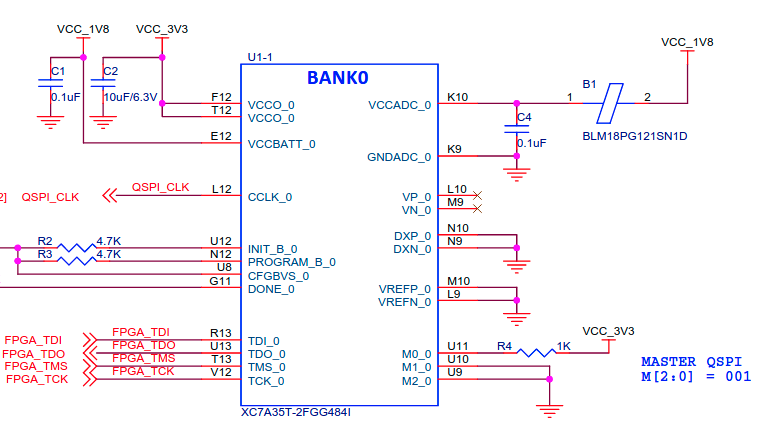
在这个模块当中我们需要使用一个 STARTUPE2模块,在A7-Lite的QPSI CLK这个引脚上,我们使用的是复用的引脚,因此直接在约束文件当中约束这个SPI的时钟引脚是无效的。为此我们需要将SPI的CLK信号连接到STARTUPE2的时钟引脚上,这样FPGA就能产生到QPSI Flash的时钟信号了。
1 | STARTUPE2 #( |
3. 下载验证
将bit文件下载到FPGA之后,会出现一个ILA窗口和一个VIO窗口
3.1 读取设备ID,厂商号,设备类型容量
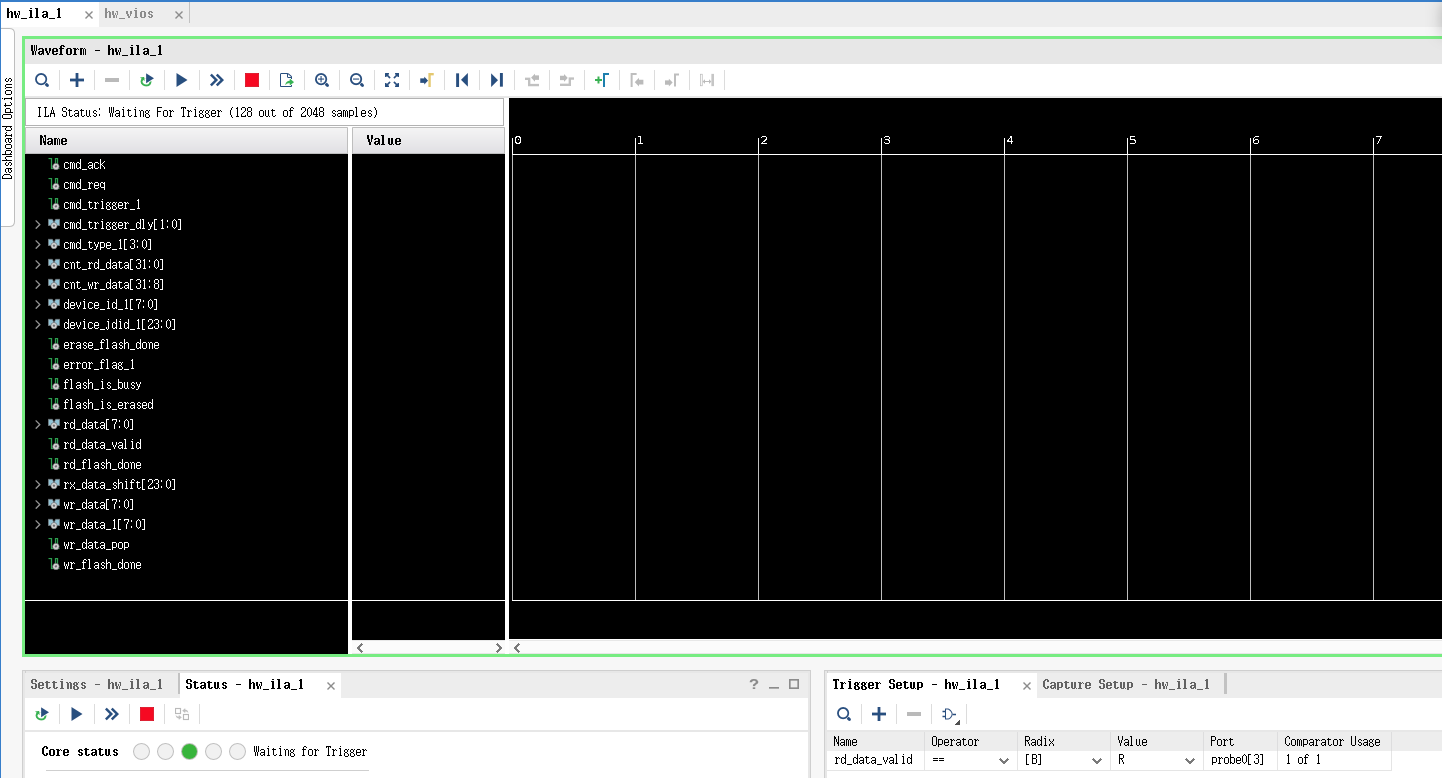
在ILA窗口当中,我们可以设置触发类型为rd_data_valid的上升沿触发。
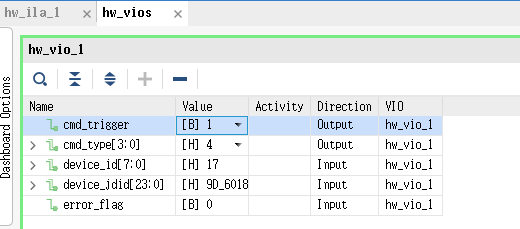
在VIO窗口当中,我们首先将cmd_type的值设置为1,这个命令是读取设备ID的操作,然后我们将cnd_trigger由0调整到1。
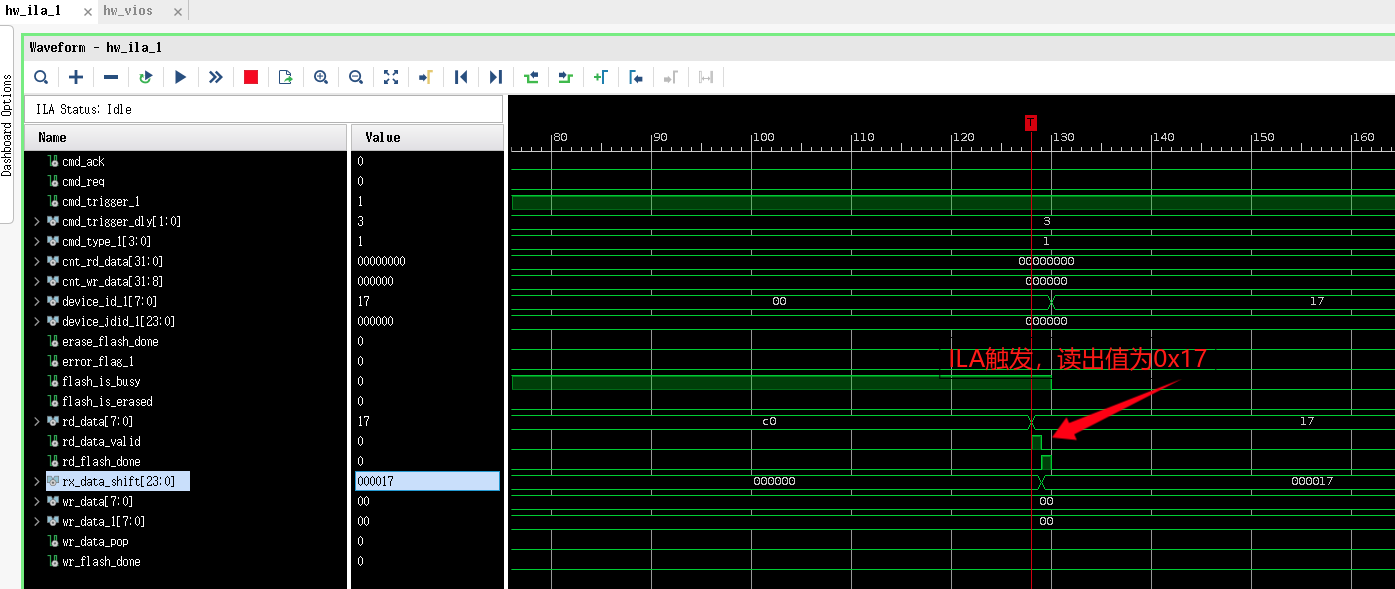
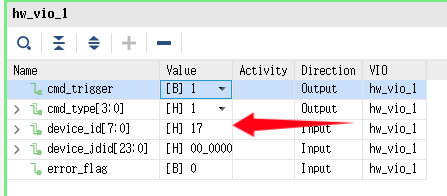
此时ILA会触发,并且VIO上将会显示读出的设备ID值。
然后我们再次点击ILA触发,是ILA进入到等待触发模式。
接下来调整vio的cmd_type=2,这个命令实现读取JDID,然后我们调整cmd_trigger由0变为1,产生一个上升沿。
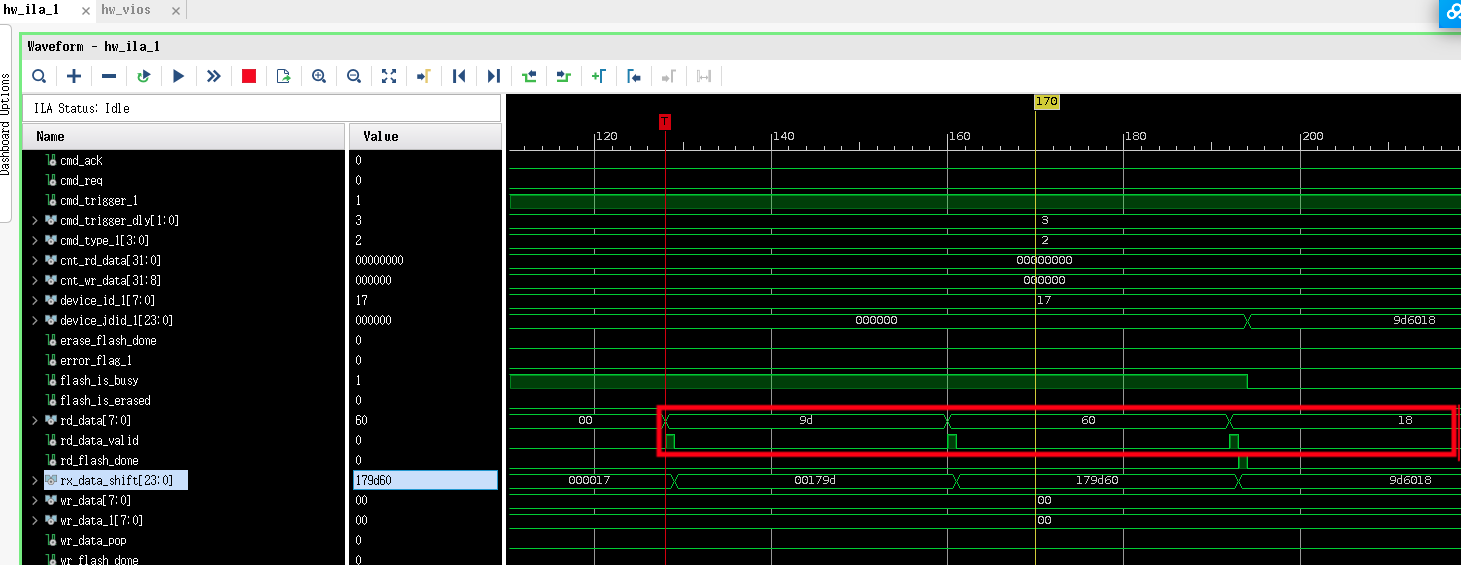
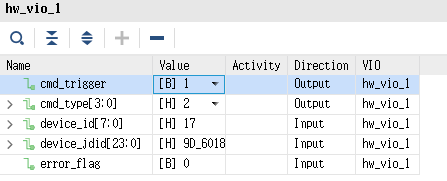
可以看到ILA触发,并且读出了JDID的值,回顾前面的设备ID我们可以看到device ID是0x17,厂商号是0x9D,存储类型和容量是0x6018
这个和我们从VIO上看到的读取到的数据都是能够吻合上的。
3.2 数据写入测试
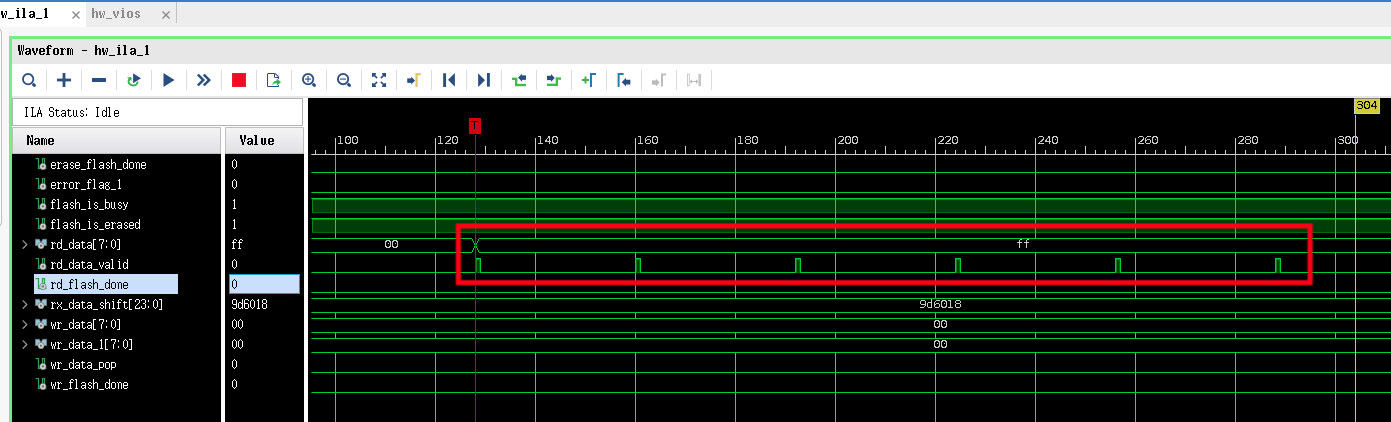
首先,对Flash进行擦除操作,在VIO窗口当中,将cmd_type设置为4,然后再将cmd_trigger由0变到1。
等待一段时间,擦除结束,我们可以准备读取擦除之后的数据。在ILA窗口当中,点击触发,等待rd_data_valid的上升沿出现。
然后回到VIO窗口党总,将cmd_type设置为5,然后再将cmd_trigger由0变到1。 可以看到ILA触发之后,所有读出的数据都为0xFF。
然后我们再对Flash进行写入操作,首先在VIO当中,将cmd_type设置为3,然后再将cmd_trigger由0变到1。
等待一段时间,写入结束,我们可以准备读取写入之后的数据。在ILA窗口当中,点击触发,等待rd_data_valid的上升沿出现。
然后回到VIO窗口党总,将cmd_type设置为5,然后再将cmd_trigger由0变到1。 可以看到ILA触发之后,读出的数据为递增数。
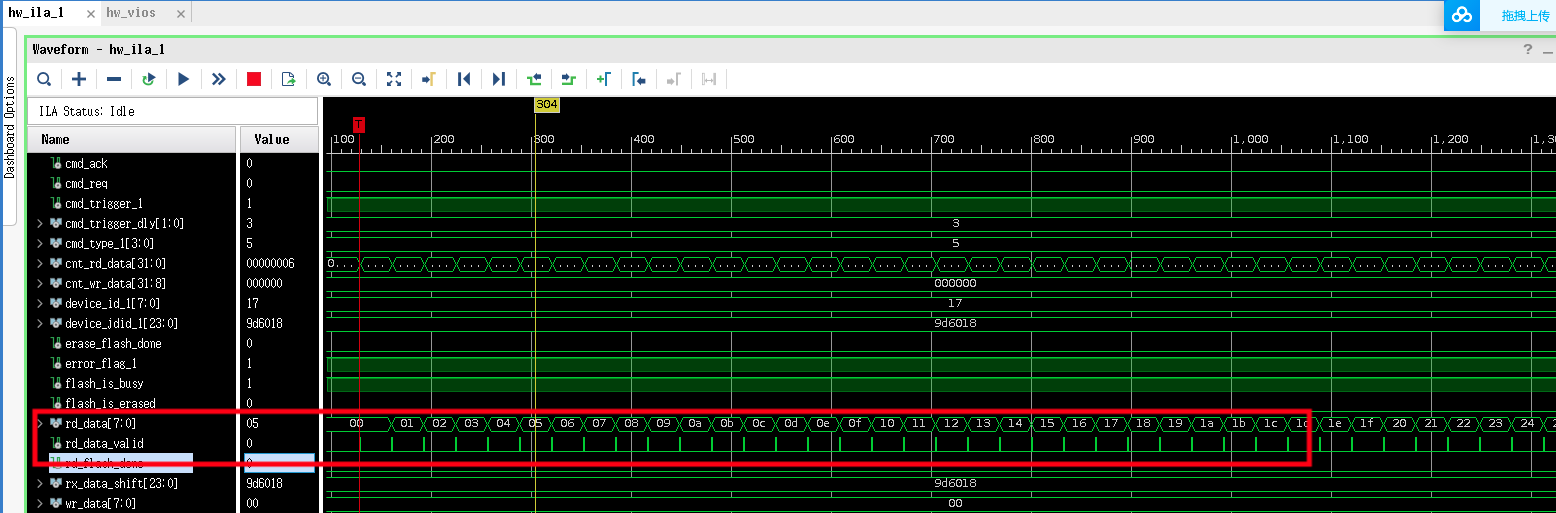
从这里可以看到数据能够被正常写入和读出。